3D光学测量
20年独立的3D机器视觉专业知识
全系列光学三维测量技术允许选择最具成本效益和一流的技术解决方案,无论制造商、品牌或某一项技术,Solarius是您在您的工业4.0的数字化质量保证的创新和进步的保证。
三维探测和再现技术表面的特征,无论是形貌,纹理或摩擦学参数,是由各种不同的物理光学成像原理实现的。这些光学成像原理允许对技术表面进行真实、完整和快速的数字化处理,并在此基础上对这些数据进行实时、自动和可靠的分析,以便监测和控制过程以及实际保证产品质量。对这些数字化表面进行存档,还可以在任何时候以容易和透明的方式实现审计跟踪或结果的后续可验证性。技术表面的光学三维测量技术是工业生产全面数字化的一个基本组成部分,使您的生产线能够“直观地检查”当前的工艺结果。因为它能让机器“看到”自己的动作,光学三维计量学对高科技项目工业4.0作出了贡献。
利用各种三维成像原理,生成形状、纹理、粗糙度和图层的数字图像。每一项3D成像原理都显示了物体在个性上的自然优势和弱点。根据表面的性质、工件的材料或产品的最终用途,特定的成像原理可能比其他原理更有利。在应用光学计量学和独立选择技术方面的经验是必不可少的。此外,每一项成像原理,经过20多年密集、工业应用的光学三维计量,已经开发出各种变体的技术实施和设计,以最好地解决自身的自然弱点。众多相互竞争的技术和供应商,及其各自的优势和劣势,使得为特定任务或更广泛的任务选择合适的技术是一个复杂而重要的决定。
Solarius公司集团提供了广泛而全面的光学三维测量系统和技术,用于数字化以及以下技术表面的计量分析。基于一个完整的技术平台,可以为每个测量应用确定最佳系统或技术的组合。Solarius基于20年在全球自动化、工业3D测量技术和光学3D表面检测和图像处理领域的专家团队的经验,独立于为您的个人任务选择最经济和技术上最佳的解决方案。

Solarcore 软件平台
Win10 Solarius SolarCore C++ 软件平台是根据行业标准设计的,通过独立的工作流程直观地引导工程师和操作员完成操作。可配置的用户和权限管理允许精细化地访问控制。该软件平台的高度灵活性可以满足各种日新月异的客户需求,C#用户界面目前有英语、中文和德语版本。它的智能架构支持快速定制、新设备集成,并能够实时处理大量数据。
现代风格的用户界面通过易于操作的功能布局,集成了计量和检验任务所需的完整工作流程以及数据处理能力。高度的整理能力和广泛的适用性相结合,使其适用于几乎任何对象和制造环境的品质保证。
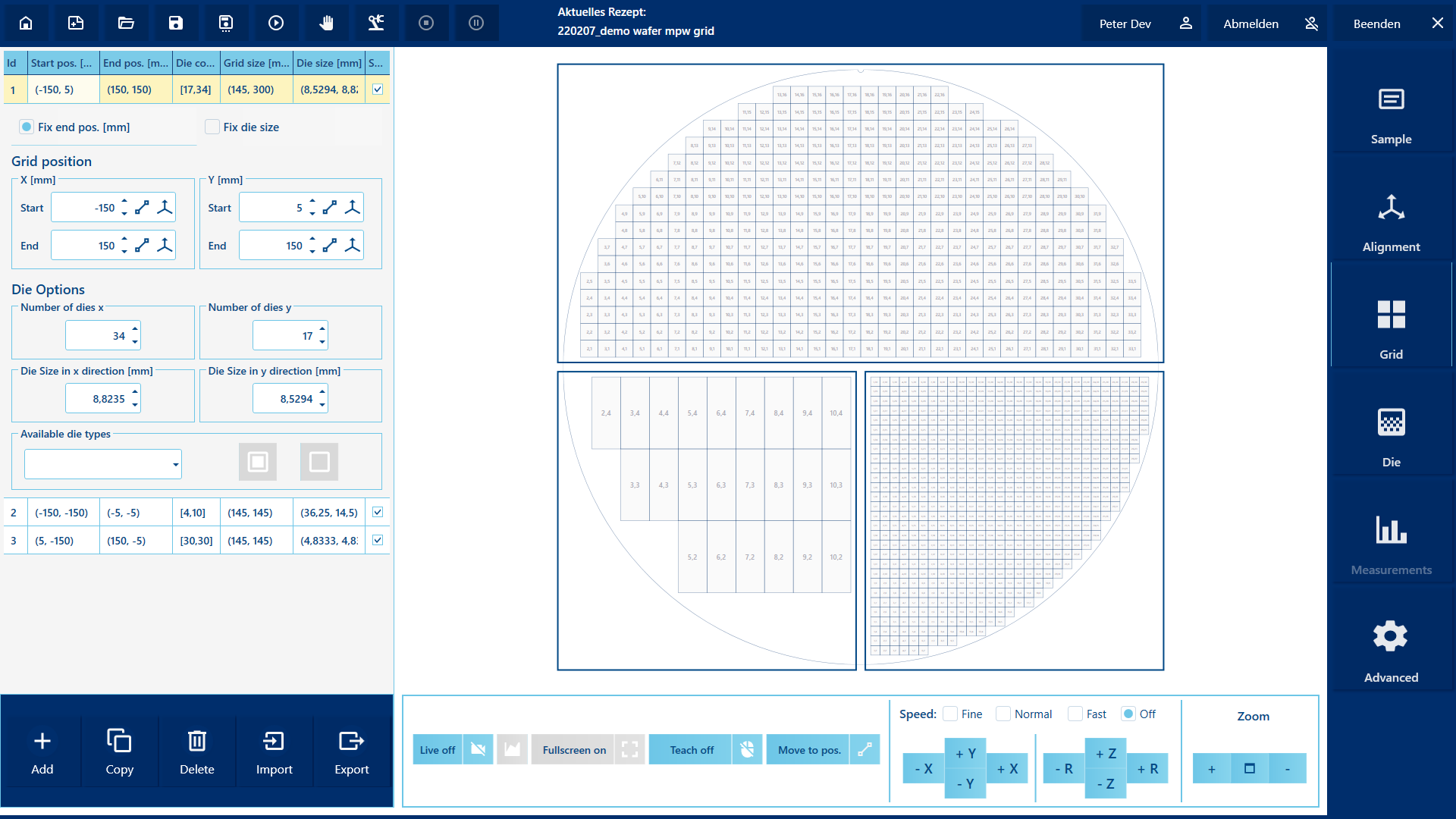
晶圆厂的标准化工作流程
SEMI晶圆加工界面为晶圆处理和计量工作流程提供可视化和功能性。在应用于晶圆和长方形基板测量时,它允许定义基于矩阵的自动测量程序、规格限制和质量相关结果的显示,同时考虑到当前用户的个人角色权限。详细审查结果,直至单个项目;晶盒或FOUP/FOSB级别的快速预览。该用户界面是Solarius SIMP工具的操作基础,支持多种应用和解决方案。
半导体工作流程允许通过模板文件名和文件夹路径定义数据导出,将通过自动QR和DDM代码识别的单个对象数据合并到单个晶圆或面板的处理中。与SECS/GEM接口工具箱一起,可用于OHT或AGVs等完全集成的晶圆厂环境的材料处理。
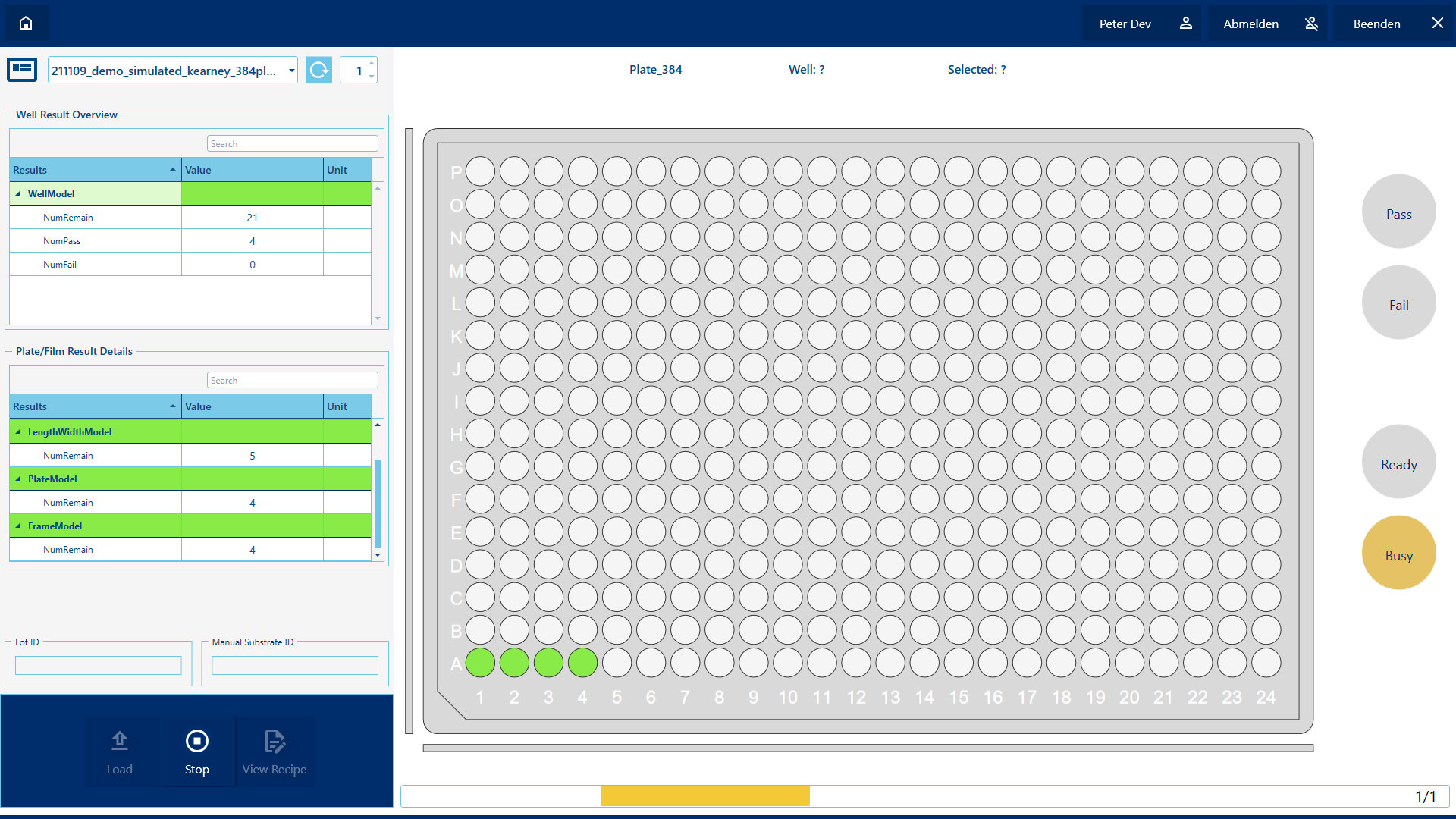
细胞培养板的定制工作流程
除了上述半导体用户界面这样的特定用户界面外,各种计量和检验任务都需要高度定制化的用户界面,以允许操作员和工程师在其质量保证过程中快速浏览。对于手动加载和/或操作的系统,有必要实现被测物体的图形表示,使操作员能够快速、清晰地访问结果数据。此外,必须在同一界面内访问处理相关功能,以避免在整个操作过程中在不同视图之间来回切换。
左边显示的定制界面是一种用于细胞培养板质量控制的特殊设计。在该检查和计量任务中,必须监测细胞培养板的几何和尺寸参数,并检测损伤和杂物。所有信息汇总在一个统一的视图中,适用于色盲人群。
数据和工厂接口
Solarius SolarCore软件平台为工厂自动化和数据传输提供了不同的接口。最新的接口是为MVTec HALCON图像处理库创建的。该接口允许在SolarCore自动化环境中实现自定义图像处理,设置和更改数据和参数的输入和输出结构,而无需借助于Solarius研发的支持。除此之外,还支持CSV或Excel以及自定义结果数据结构的通用数据导出接口。该软件平台附带了一个用于处理输入和输出数据的双SQL server接口。对于先进的工厂自动化,该平台提供了OPC/UA服务器和客户端基础设施,以及支持SEMI标准E4、E5、E30、E37、E39、E40、E87、E90、E94、E116、E84 AMHS的完整300毫米SECS/GEM接口。
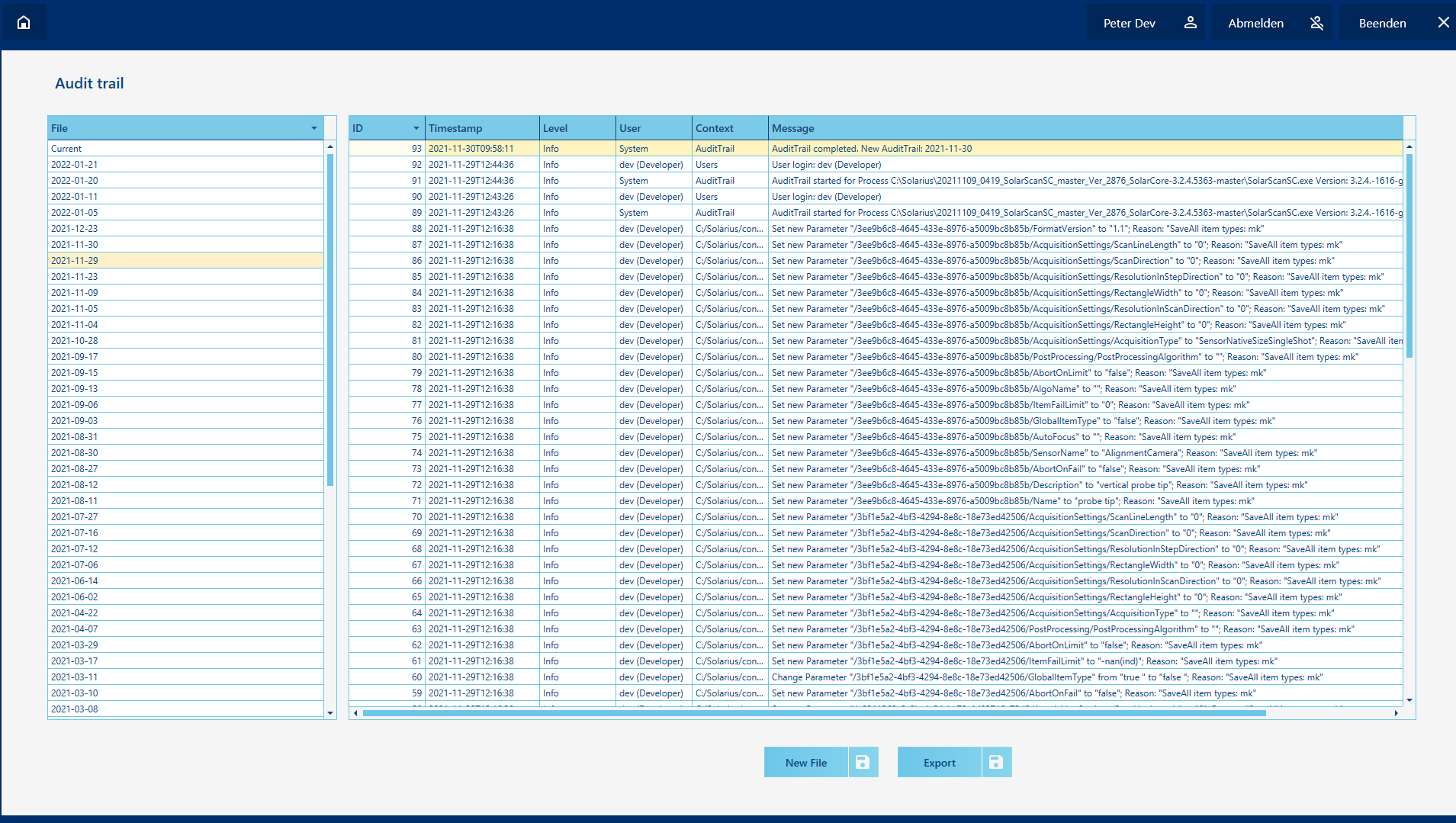
可追溯性和合规性
符合FDA联邦法规21章第11款的综合审计跟踪是一个先进的记录数据库,用于过程相关信息以及跟踪变更和过程相关数据,可以连接到电子用户识别系统以及平台的用户和角色管理。最初,审计跟踪是为2020年交付给勃林格殷格翰microParts的SIMP工具设计的。审计跟踪允许FDA合规且可靠地跟踪所有制造和QA相关变更,或者可以简单地用作基于操作员的工具监控的消息记录窗口。
软件平台以及专门的图像处理算法遵循GAMP指南。半导体用户界面工作流程根据适用的SEMI标准实施。


成像技术






技术指南
其下表能快速根据最常见的测量应用来选择不同的技术,做为参考。但是,在大多数情况下,下表也或许会显示一个测量物体的需求与各个3D测量技术的能力相矛盾。有关详细信息,请通过以下方式与我们的专家联系t: inquiry@solarius-europe.com
| 共聚焦 | 彩色共聚焦 | 干涉法 | 变焦 | 三角 | |
| 采集速度 | - | o | - | o | ++ |
| 纵向分辨率 | + | + | ++ | o | - |
| 横向分辨率 | ++ | + | o | o | - |
| 动态表面 | ++ | ++ | + | o | - |
| 粗糙表面 | ++ | ++ | - | - | ++ |
| 镜面 | ++ | ++ | ++ | + | -- |
| 陡峭边缘 | o | o | - | + | -- |
| 层厚度 | + | + | ++ | - | -- |
| 高度测量范围 | + | o | o | + | ++ |
| 环境稳健性 | ++ | + | -- | 0 | ++ |
++ 良 / + 好 / o 一般 / - 稍逊 / -- 劣